


APLICAÇÃO DE LÓGICA FUZZY PARA ANÁLISE DOS MODOS DE FALHA EM INVERSORES DE FREQUÊNCIA PWM CONTROLANDO MOTORES DE INDUÇÃO
índice
- 1. RESUMO
- 2. INTRODUÇÃO
- 3. OBJETIVOS
- 4. JUSTIFICATIVA
- 5. ESTRUTURA DO TRABALHO
- 6. FUNDAMENTAÇÃO TEÓRICA PARA ACIONAMENTOS CA COM VARIAÇÃO DE VELOCIDADE
- 6.1 EVOLUÇÃO HISTÓRICA DA MÁQUINA ELÉTRICA GIRANTE
- 6.2 PRINCÍPIOS DE FUNCIONAMENTO DE UM MOTOR ASSÍNCRONO
- 6.3 TIPOS DE MOTORES ASSÍNCRONOS
- 6.3.1 Motor com rotor bobinado
- 6.3.2 Motor gaiola de esquilo
- 6.4 VELOCIDADE DO MOTOR ASSÍNCRONO
- 6.5 PRINCIPAIS PARTES DE UM MOTOR DE INDUÇÃO
- 6.6 INVERSOR DE FREQUÊNCIA PWM
- 6.7 PRINCÍPIO DE FUNCIONAMENTO DE UM INVERSOR DE FREQUÊNCIA
- 6.8 TIPOS DE INVERSORES DE FREQUÊNCIA PWME
- 6.9 INVERSOR DE FREQUÊNCIA PWM E SEUS COMPONENTES
- 6.9.1 Barramento CC
- 6.9.2 Unidade de frenagem
- 6.9.3 Modulador PWM-CPU
- 6.9.4 Módulo de potência IGBT
- 6.9.5 Módulo de pré-carga
- 6.10 MODOS DE CONTROLE UTILIZADOS EM INVERSORES PWM VSI
- 7. MODOS DE FALHAS EM INVERSORES DE FREQUÊNCIA PWM E METÓDOS PARA ANÁLISE E DIAGNÓSTICO
- 7.1 CONCEITOS SOBRE FALHAS, MODOS DE FALHAS, DIAGNÓSTICOS E DEFEITOS.
- 7.2 CLASSIFICAÇÃO DAS FALHAS EM INVERSORES DE FREQUÊNCIA PWM
- 7.2.1 Falhas de IGBT
- 7.2.2 Falhas no barramento CC e capacitores
- 7.2.3 Falhas no retificador
- 7.2.4 Falhas no circuito de comando e controle
- 7.3 MECANISMOS DE FALHAS
- 7.3.1 Mecanismos de falhas relacionados a sobrecargas elétricas
- 7.3.2 Mecanismos de falha relacionados ao longo prazo
- 7.4 CLASSES DE FALHAS EM INVERSORES DE FREQUÊNCIA PWM
- 7.4.1 Falhas de Classe 1
- 7.4.2 Falhas de Classe 2
- 7.5 CIRCUITO CONVENCIONAL DE PROTEÇÃO DE UM INVERSOR DE FREQUÊNCIA PWM
- 7.6 MÉTODOS PARA DIAGNÓSTICO DE FALHAS
- 8. ANÁLISE DOS MODOS DE FALHA EM INVERSORES DE FREQUÊNCIA PWM COM A APLICAÇÃO DE LÓGICA FUZZY
- 8.1 HISTÓRIA DA LÓGICA FUZZY
- 8.2 CONJUNTOS FUZZY
- 8.2.1 Números Fuzzy
- 8.2.2 Caracteristicas dos números Fuzzy
- 8.3 VARIÁVEIS LINGUÍSTICAS
- 8.4 ESTRUTURA DE UM PROCESSO CONTROLADO POR LÓGICA FUZZY
- 8.5 APLICAÇÕES DA LÓGICA FUZZY
- 8.6 MÉTODOS BASEADOS EM LÓGICA FUZZY PARA DIAGNÓSTICO DOS MODOS DE FALHA EM INVERSORES DE FREQUÊNCIA PWM
- 8.6.1 Definição do método a ser utilizado
- 8.6.2 Método baseado na assinatura de corrente de um motor
- 8.6.3 Método baseado no reconhecimento de padrões
- 8.6.4 Método de análise da corrente pelo vetor de Park
- 8.7 ANÁLISE DE CASOS DE FALHAS EM INVERSORES PWM APLICANDO LÓGICA FUZZY
- 8.8 VIABILIDADE PARA IMPLANTAÇÃO DE UM SISTEMA DE DIAGNÓSTICO FUZZY EM UMA PLANTA
- 9. CONCLUSÃO
- 10. REFERÊNCIAS BIBLIOGRÁFICAS
O texto publicado foi encaminhado por um usuário do site por meio do canal colaborativo Monografias. Brasil Escola não se responsabiliza pelo conteúdo do artigo publicado, que é de total responsabilidade do autor . Para acessar os textos produzidos pelo site, acesse: https://www.brasilescola.com.
1. RESUMO
Este trabalho está centrado no estudo da aplicação de lógica Fuzzy para análise dos modos de falhas em inversores de frequência PWM que operam controlando motores de indução. São inúmeros os fatores que influenciam o desempenho dos inversores PWM quando subjugados a quedas de tensão, temperatura ambiente, sobrecargas e, entre eles, se enquadram o mecanismo de falha que produziu a parada do equipamento. Com base nestas questões, são diversos os estudos empreendidos para diagnosticar e corrigir as avarias e reduzir custos com manutenção. Os sistemas especialistas contêm uma base de conhecimento com habilidade analítica e heurística obtida a partir de uma metodologia de raciocínio de um especialista humano. Entre os sistemas especialistas, destacam-se os meios que se utilizam da lógica Fuzzy para identificar os modos de falhas. Os métodos baseados na assinatura da corrente de um motor, reconhecimento de padrões e análise da trajetória da corrente pelo vetor de Park para identificação de falhas oferecem uma excelente alternativa. Neste caso, os métodos indiretos para definir os modos de falha e o diagnóstico são úteis na identificação do tipo de avaria, no acompanhamento de sua evolução. Com base na relevância deste tema, muitos estudos vêm sendo empreendidos para oferecer um diagnóstico mais preciso acerca dos modos e causas de falhas.
Palavras-chave: Inversores de Frequência PWM, Motores de Indução, Modos de Falha, lógica Fuzzy.
ABSTRACT
This work focuses on the study of the Fuzzy logic application to analyze the failure modes in frequency inverters PWM operating controlling induction motors. There are numerous factors that influence the performance of the PWM inverter when subjugated to voltage drops, room temperature, overload, and among them, fall within the failure mechanism that produced the equipment downtime. Based on these issues, there are several studies undertaken to diagnose and fix faults and reduce maintenance costs. Expert systems contain a knowledge base with analytical skills and heuristics obtained from a reasoning methodology of a human expert. Among the expert systems, are highlighted the means that use of Fuzzy logic to identify failure modes. Methods based on the signature of the current of a motor, pattern recognition and analysis of the current’s trajectory through the Park vector for fault identification offer an excellent alternative. In this case, the indirect methods for defining failure modes and diagnostics are useful in identifying the type of fault and in monitoring its evolution. Based on the relevance of this issue, many studies have been undertaken to provide a more accurate diagnosis about the modes and causes of failure.
Keywords: Inverters PWM Frequency Induction Motors, Failure Modes, Fuzzy logic.
2. INTRODUÇÃO
É fato que o uso do inversor de frequência PWM (Pulse-Width Modulation / Modulação por Largura de Pulso) controlando motores de indução na indústria é utilizado em grande escala. Kadaník (1998) destaca que o conhecimento sobre o comportamento de um sistema e seu modo de falha é extremamente importante do ponto de vista do desempenho melhorado de um processo quase não tolerante a falhas. A fiabilidade dos sistemas de eletrônica de potência é de suma importância no setor industrial, comercial, aeroespacial, militares e instituições de saúde.
A abundância de aplicações que podem ser consideradas críticas significa que elas têm altas metas estabelecidas para a confiabilidade e disponibilidade. A exigência é que praticamente nenhuma falha deveria ocorrer e, consequentemente, encerrar o processo. Meios adequados devem também ser usados para monitorar o estado da unidade, conhecer os mecanismos de falha dos componentes eletrônicos e a segurança do sistema controlado (SOOD, 2016).
Para o ramo da Engenharia, a análise dos modos de falha e a detecção de possíveis falhas representa um importante e difícil papel.
Quanto à pesquisa “Aplicação de lógica Fuzzy para análise dos modos de falha em inversores de frequência PWM controlando motores de indução”, é preciso ter em mente que o assunto está estritamente associado à dimensão da máquina, à sua localização e à função que desempenha no processo em que está inserida.
Os sistemas inteligentes utilizados na identificação de anormalidades, tais como sistemas especialistas baseados em lógica Fuzzy para análise dos modos de falhas, destacam-se por várias particularidades, dentre as quais a possibilidade de tomadas de decisão a partir dos sinais do inversor em ambos os domínios (tempo e frequência), predição de falhas incipientes devido às anomalias de operação, reconhecimento de padrões baseados nos conhecimentos heurístico e analítico, mapeamento não linear no monitoramento das condições do inversor PWM, emulação e aplicação do conhecimento humano e classificação das falhas (BORGES DA SILVA, 2008).
Os inversores de frequência ficam subordinados a condições impróprias como temperaturas elevadas, má qualidade da energia recebida e variações de carga e sobrecargas constantes, o que os deixam mais sensíveis à ocorrência de falhas por motivação interna ou externa. Neste ínterim, o conhecimento dos modos e causas das falhas contribui para o diagnóstico e detecção de falhas a tempo, o que aumenta o tempo de vida útil do equipamento e a diminuição do tempo de reparo e, consequentemente, os custos de manutenção (MOTOKI et alii, 2008).
3. OBJETIVOS
Este trabalho foi desenvolvido com o objetivo geral de uma explanação sobre algumas técnicas bem sucedidas com aplicação de sistemas especialistas para análise dos modos de falhas em inversores de frequência PWM que controlam motores de indução, mais precisamente o uso de sistemas inteligentes com a utilização da lógica Fuzzy para se obter diagnósticos mais precisos e a localização correta de problemas em componentes eletrônicos de tais equipamentos.
Entre os objetivos específicos, foi proposto descrever a teoria dos motores de indução, modelos existentes, suas principais partes e o princípio de funcionamento.
Propor um melhor entendimento sobre o princípio de funcionamento de um inversor de frequência PWM, conhecer seus principais componentes eletrônicos e funções e modos de falha. Esclarecer os conceitos de falha, defeitos e possíveis causas de anomalia.
Interpretar a analisar os possíveis mecanismos de falha, modos de falha em inversores de frequência PWM e estudar e apresentar métodos para análise de falhas que levem ao aumento da disponibilidade e da confiabilidade, sendo as razões pela crescente demanda por sistemas especialistas baseados em lógica Fuzzy para análise e diagnóstico de falhas corretos. Os sistemas especialistas baseados na lógica Fuzzy possuem habilidades para lidar com variáveis linguísticas através de conhecimentos heurísticos e analíticos.
Apresentar uma visão geral sobre a atuação e entendimento dos diferentes tipos de proteções e sistemas inteligentes presentes nas etapas do processo de diagnóstico de falhas abordando os métodos baseados na assinatura da corrente de um motor, reconhecimento de padrões e análise da trajetória da corrente pelo vetor de Park para identificação de falhas;
Identificar os principais problemas em aberto, assim como apontar algumas tendências para pesquisas futuras.
4. JUSTIFICATIVA
A pesquisa científica desenvolvida e aqui evidenciada tem intuito de levar ao conhecimento a importância da detecção precoce de falhas por meio da identificação de falhas potenciais, antes que eles ocorram, através do entendimento dos modos de falha e aplicação de sistemas especialistas. Atualmente, os inversores são obrigados a serem protegidos por disjuntores e fusíveis que interrompem as correntes de falha instantânea.
No entanto, estes dispositivos são destinados apenas como dispositivos de segurança e eles podem proteger o inversor e pessoas que estejam próximas de uma lesão devido a uma falha, mas não vão alertar sobre falhas potenciais antes que eles ocorram.
A identificação de falhas incipientes, por outro lado, permite a manutenção preventiva ser agendada para máquinas que podem não ser normalmente devido para o serviço e pode também prevenir um longo período de tempo de inatividade causado por uma falha de alta gravidade, o que pode causar grande perda econômica.
Entre as consequências destas anomalias nos inversores de frequência PWM estão desarmes e queima de componentes eletrônicos, causando a perda de funcionalidade do inversor, e em alguns casos, parando uma fábrica completamente.
Com base nesses e em estudos futuros, justifica-se a escolha do presente tema por se tratar de assunto atual, onde se tem como constatação a importância da preservação e do bom funcionamento dos inversores de frequência PWM para a indústria, prevenindo gastos e perda de tempo indesejável.
5. ESTRUTURA DO TRABALHO
O presente estudo tem como âmbito de assunto “Aplicação de lógica Fuzzy para análise dos modos de falha em inversores de frequência PWM controlando motores de indução”, tomando por base estudos de diversos autores publicados em artigos científicos, dissertações, doutrinas, entre outros.
Para desenvolver este trabalho, opta-se por realizar uma pesquisa bibliográfica exploratória, onde, por meio de um levantamento bibliográfico de fontes variadas que vão desde monografias, livros técnicos, revistas técnicas, congressos, artigos, teses e estudos assegurados publicados na internet, procura-se abordar o tema proposto.
Importante citar que a pesquisa bibliográfica não é uma mera repetição do que já foi dito ou escrito sobre o assunto em questão, mas propicia o exame do tema sob novo enfoque ou abordagem, chegando a novas conclusões, de acordo com o objeto de estudo, os objetivos a serem alcançados e o grau de complexidade do assunto. A pesquisa é um procedimento reflexivo, sistemático, controlado e crítico, que permite descobrir novos fatos ou dados, relações ou leis, em qualquer campo de conhecimento (ZANELLA, 2009).
Os dados da pesquisa foram coletados, sobretudo, em bibliotecas virtuais, onde as palavras-chave utilizadas foram “Motores de indução”, “lógica Fuzzy`” e “Inversores de frequência PWM”, “modos de falha” nos índices, onde a ordem dos resultados seguiu o ano de publicação dos artigos de forma decrescente. Abordando artigos com tradução em português e em língua estrangeira. A pesquisa desenvolveu-se entre os anos 2015 e 2016, priorizando as regras de autoria.
A introdução e os capítulos foram organizados da seguinte forma:
-
A Introdução deste estudo foi elaborada para discorrer brevemente a pesquisa empreendida, para que se possa conhecer o conteúdo da pesquisa materializada, as premissas que motivaram e que apontaram a escolha do tema e o enfoque neste trabalho realizado. Deste modo, a introdução visou tornar claro a importância e transmitir a inicialização quanto ao tema proposto.
-
O primeiro capítulo foi chamado de “Fundamentação teórica para acionamentos CA com variação de velocidade”. Este capítulo se refere às máquinas elétricas CA (corrente alternada) e ao seu acionamento realizado por inversores de frequência PWM, formulado a partir da evolução histórica, princípio de funcionamento, tipos e seus principais componentes.
-
O segundo capítulo foi chamado de “Modos de falhas em inversores de frequência PWM e métodos para análise e diagnóstico”. O segundo capítulo foi elaborado trazendo um melhor esclarecimento quanto às definições dos conceitos sobre falhas, modos de falhas, classificação das falhas, mecanismos de falhas e métodos utilizados para identificação das falhas.
-
O terceiro capítulo denominado de “Análise dos modos de falha em inversores de frequência PWM com a aplicação de lógica Fuzzy”. O capítulo é desenvolvido com a finalidade de trazer a elucidação sobre a aplicação de sistemas especialistas baseados em lógica Fuzzy, iniciando-se pela história da lógica Fuzzy, conjuntos e números Fuzzy, estrutura de um processo baseado em lógica Fuzzy, aplicações, métodos baseados em lógica Fuzzy para diagnóstico de falha até à viabilidade para implantação de um sistema especialista Fuzzy. São mostrados experimentos com aplicação direta da lógica Fuzzy e técnicas para se identificar os possíveis modos de falha e a localização de um problema no circuito.
-
O quarto capítulo finaliza o trabalho, a “Conclusão” correlaciona os fundamentos que foram propostos nos capítulos anteriores com uma apreciação dos principais pontos apresentados que geraram um resultado. Neste capítulo será evidenciado que a aplicação da lógica fuzzy em sistemas especialistas já faz parte dos métodos para análise dos modos de falha em inversores de frequência e que as habilidades que este sistema possui são adquiridas com a ajuda de um especialista. Este especialista precisa conhecer a máquina em questão e os métodos a serem utilizados.
Também se faz ver que pesquisa científica abre espaço para que sejam identificadas novas discussões e pontos de vista diferentes para problemas atuais e futuros.
6. FUNDAMENTAÇÃO TEÓRICA PARA ACIONAMENTOS CA COM VARIAÇÃO DE VELOCIDADE
6.1. EVOLUÇÃO HISTÓRICA DA MÁQUINA ELÉTRICA GIRANTE
Segundo Sens (2001), foi o engenheiro eletricista Dobrowolsky, da empresa AEG, de Berlim, que, dando continuidade aos estudos do motor de corrente alternada, entrou com uma solicitação de patente em 1889 para a máquina assíncrona com rotor de gaiola.
O equipamento demonstrado tinha uma potência de 80 watts, um rendimento aproximado de 80% em relação à potência absorvida e um excelente conjugado de partida.
As vantagens do motor com rotor de gaiola face ao de corrente contínua eram acentuadas: construção mais simples, menor ruído, baixa manutenção e elevada segurança em operação. Foi com Dobrowolsky que, em 1891, nasceu a primeira fabricação em série de motores assíncronos, nas potências de 0,4 a 7,5KW.
6.2. PRINCÍPIOS DE FUNCIONAMENTO DE UM MOTOR ASSÍNCRONO
Chapman (2013) afirma que o primeiro ponto fundamental para compreender o princípio de funcionamento de um motor assíncrono é entender as Leis de Faraday e a Lei de Lenz. A Lei de Faraday afirma que, se existe um fluxo passando por uma espira de um fio condutor, então uma tensão será induzida, sendo diretamente proporcional à taxa de variação do fluxo relacionada ao tempo, na qual pela equação, temos:

Em que:
eind = tensão induzida em uma espira da bobina em volts;
Φ = o fluxo que passa através da espira em Weber;
t = tempo em s
Se uma bobina tiver N espiras e se o mesmo fluxo cruzar todas elas, então a tensão induzida na bobina inteira será dada por:

Em que:
eind = tensão induzida na bobina;
N = número de espiras de fio da bobina;
Φ = fluxo que passa através da bobina em Weber;
t = tempo em segundos.
O sinal negativo nas equações é uma sentença da Lei de Lenz. Essa lei atesta que o sentido com que a tensão se eleva na bobina é tal que, se os terminais da bobina estivessem ligados em curto-circuito, então seria gerada uma corrente que causaria um fluxo contrário à variação original de fluxo. Como a tensão induzida é oposta à variação que a está produzindo, então deve ser inserido um sinal negativo na equação.
O significado da Lei de Lenz pode ser melhor entendido na figura 1.
Figura 1: O significado da Lei de Lenz: (a) uma bobina envolvendo um fluxo magnético crescente; (b) determinação da polaridade da tensão resultante.
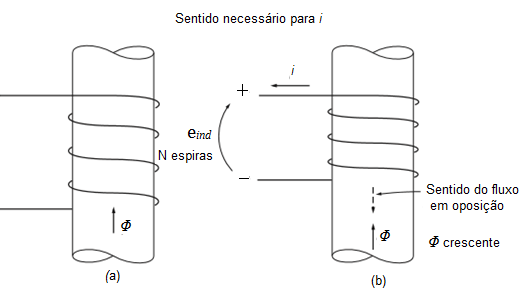
Fonte: (CHAPMAN, 2013).
De acordo com Fitzgerald (2006), as máquinas CA usualmente podem ser classificadas em dois tipos: síncronas e assíncronas ou de indução. Nas máquinas síncronas, as correntes do enrolamento do rotor são supridas por contatos rotativos conectados de forma direta na parte fixa do motor, este tipo de máquina não será abordado neste trabalho. Nas máquinas assíncronas, as correntes são induzidas nas espiras do rotor por meio combinado da variação, no tempo, de correntes no estator e do movimento do rotor relacionado ao estator.
A maior parte dos equipamentos, máquinas e sistemas atuais tem como eficácia motora o motor trifásico assíncrono, concentrando-se neste fator a necessidade pungente de entender seu funcionamento, conhecer os dados técnicos do motor, parâmetros de operação e entender as limitações de seu funcionamento.
6.3. TIPOS DE MOTORES ASSÍNCRONOS
No que tange aos aspectos construtivos, o motor assíncrono pode ser de dois tipos: rotor gaiola ou rotor bobinado. Devido a velocidade do rotor ser menor comparado ao campo girante, esse tipo de máquina é denominada máquina assíncrona ou motor de indução, onde a diferença da velocidade do rotor e do campo se chama escorregamento. (NASCIMENTO JR., 2011).
6.3.1. Motor com rotor bobinado
O motor de rotor bobinado é usado na maioria das vezes em potências elevadas onde são necessárias partidas com cargas de elevado torque resistente e maior inercia. Pode ser usado com variação de velocidade recorrendo à aceleração rotórica através do uso de banco de resistências, controlando o binário de partida de uma forma mais progressiva. Possui anéis e escovas que o tornam mais caro e o faz necessitar de maior manutenção, sendo este o motivo de ser menos usado na indústria (FRANCISCO, 2006).
A figura 2 apresenta um motor de indução com rotor bobinado:
Figura 2: Motor de indução rotor bobinado.
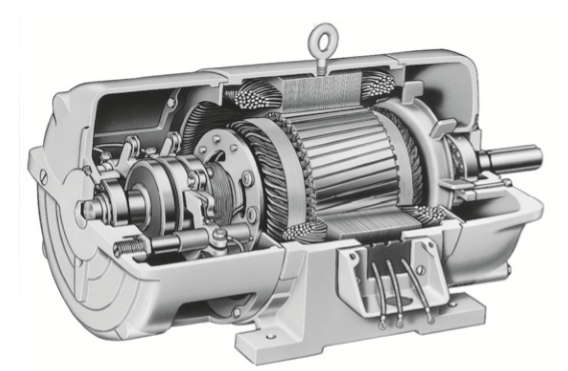
Fonte:(CHAPMAM, 2013).
6.3.2. Motor gaiola de esquilo
O motor de indução trifásico com rotor em gaiola responde por cerca de 75% dos motores usados no Brasil. Entre suas vantagens podem ser citadas as condicionantes de possuir uma construção robusta, sem centelhas, exigir menor manutenção, custo mais baixo, simplicidade de comando e ser versátil quanto à adaptação a vários tipos de cargas (MESQUITA, 2009).
A figura 3 se refere a um motor de indução tipo gaiola de esquilo:
Figura 3: Motor de indução gaiola de esquilo.
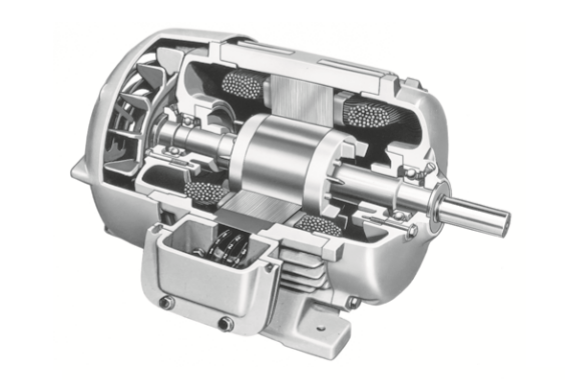
Fonte:(CHAPMAM, 2013).
6.4. VELOCIDADE DO MOTOR ASSÍNCRONO
Segundo Francisco (2006), a velocidade de um motor assíncrono é definida pela frequência da corrente que alimenta o motor e pelo número de pares de polos do estator, que é dada pela equação:

Onde:
n= velocidade do campo girante (rpm);
f= frequência da corrente (Hz);
p= número de pares de polos;
60= valor indicado como constante para uma frequência de rede em tensão alternada de 60Hz.
A velocidade do rotor do motor assíncrono é ligeiramente menor que a velocidade do campo girante, esse fenômeno é chamado escorregamento e pode ser calculado pela equação:

Onde:
ns= Velocidade síncrona (rpm);
nN= Velocidade nominal (rpm);
S100= Escorregamento (%);
6.5. PRINCIPAIS PARTES DE UM MOTOR DE INDUÇÃO
Estator: Formado de lâminas ferromagnéticas agrupadas e isoladas entre si, em que fica a carcaça, que é a estrutura que também tem a finalidade de fixação do conjunto. Possui uma construção robusta em ferro fundido, aço ou alumínio, resistente à oxidação e com aletas para arrefecimento. O estator é formado de uma carcaça, núcleo de chapas e um enrolamento trifásico (CHAPMAN, 2013).
Rotor: É constituído por um núcleo ferromagnético, também laminado, onde também se encontra um enrolamento. O rotor é formado de eixo, núcleo de lâminas, barras e anéis curto-circuitados (FRANCHI, 2011).
No motor de indução também são encontradas outras partes: tampa defletora, ventoinha, caixa de conexões, terminais de ligação, rolamentos e escovas somente para o motor com rotor bobinado.
6.6. INVERSOR DE FREQUÊNCIA PWM
6.6.1. Evolução histórica do inversor de frequência
De acordo com Martins (2006), na metade da década de 1980, pesquisas culminaram com o desenvolvimento dos transistores bipolares de porta isolada IGBT (Transistor Bipolar com Gate Isolado), decretando um novo marco na história dos dispositivos semicondutores de potência. Os IGBTs são dispositivos híbridos que são formados por uma porta-MOS e um transistor bipolar de potência, unindo as vantagens de grande capacidade de condução de corrente dos BJTs (transistor de junção bipolar) com a alta impedância de entrada dos MOSFETs (Transistor de Efeito de Campo de Óxido de Metal). Devido a essas vantagens, os IGBTs vieram para substituir os BJTs nas arquiteturas de conversores CC-CA.
Ainda segundo Martins (2006), essa crescente evolução ocasionou, no ano de 2003, no mercado mundial de vendas de dispositivos de acionamentos para motores CA com controladores totalmente digitais movimentou um capital em torno de 12 bilhões de dólares, com expectativa de crescimento anual de 15%. Atualmente o dispositivo semicondutor de potência IGBT é o mais empregado na fabricação de inversores para aplicações de acionamento CA até potências de 1500HP.
Acionamentos de motores de indução alimentados por inversores PWM estão sendo usados em maior número ao longo de uma ampla variedade de aplicações industriais e comerciais. As vantagens são inúmeras e podem ser brevemente resumidas como melhor controle dos processos, que, entre outros aspectos, levam à economia de energia, controle de torque e correntes menores na partida, o que proporciona uma vida mais longa para bombas e outros equipamentos mecânicos, maior confiabilidade e desempenho. Motores alimentados por inversores PWM são geralmente mais confiáveis do que os que operam em regime de partida direta (KADANÍK, 1998).
6.7. PRINCÍPIO DE FUNCIONAMENTO DE UM INVERSOR DE FREQUÊNCIA
Rashid (1999) define inversores de frequência como equipamentos eletrônicos que convertem CC em CA que tem por finalidade converter tensão de entrada contínua em uma tensão de saída alternada. Os inversores são usados na indústria no controle de velocidade de motores CA, sistemas de energia fotovoltaica, alimentação ininterrupta, entre outras aplicações.
Uma tensão variável de saída pode ser obtida variando-se a amplitude da tensão contínua obtida pela variação do ganho do inversor. Uma técnica muito usada para essa finalidade é a modulação por largura de pulso PWM. O ganho de um inversor de frequência pode ser determinado como a relação entre a tensão de saída CA e a tensão de entrada CC. As formas de onda da tensão de saída dos inversores deveriam ser ideais, mas isso na prática não acontece, complementou Rashid (1999).
A tensão de saída tem um formato de onda periódica e, com uma boa aproximação, poderá chegar a ser considerada senoidal. Os inversores podem ser classificados conforme o número de fases, componentes de potência, princípios de comutação e pelas formas de onda de saída. O inversor PWM modula uma onda de forma quadrada, procurando se aproximar ao máximo de uma onda senoidal (FRANCHI, 2011).
A figura 4 representa a ilustração de um modulador PWM:
Figura 4: Representação de um modulador PWM
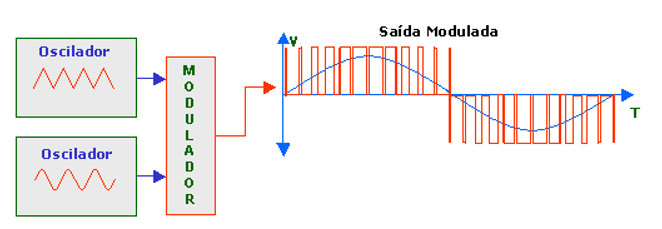
Fonte: (SILVA, 2009).
6.8. TIPOS DE INVERSORES DE FREQUÊNCIA PWME
m geral, existem dois tipos básicos, que são totalmente diferentes em seu comportamento.
O primeiro tipo de inversor é chamado de inversor CSI (inversor com saída de corrente), e fornece uma onda de corrente comutada nos terminais do motor. A tensão do barramento DC (corrente contínua) é mantida fixa com o uso de um robusto indutor no circuito intermediário. Essa configuração bloqueia as variações repentinas na corrente de alimentação do circuito. O segundo é chamado inversor VSI (inversor com saída de tensão). O inversor VSI é tipo de inversor mais comum e será abordado neste trabalho (AHMED, 2000).
A tensão do barramento DC é recebida por meio de um retificador e é mantida filtrada através da utilização de capacitores no barramento DC. Uma configuração muito adotada é o inversor VSI em ponte utilizando a técnica de modulação por largura de pulso PWM. No entanto, a construção mecânica do motor, em termos de sensibilidade dos rolamentos e equilíbrio, limita a frequência máxima sobre a qual pode ser operado. A potência fornecida ao motor por um inversor PWM possui alguns efeitos adversos como aumento de aquecimento, tensões de pico e aumento de ruído audível (KADANÍK, 1998).
A figura 5 apresenta a imagem de inversores de frequência PWM:
Figura 5: Inversores de frequência PWM.

Fonte: (WWW.SERVDRIVE.COM.BR).
6.9. INVERSOR DE FREQUÊNCIA PWM E SEUS COMPONENTES
Franchi (2008) dividiu o inversor de frequência PWM em componentes com suas respectivas funções para um melhor esclarecimento em: retificador trifásico, barramento CC, unidade de frenagem, modulador PWM-CPU, módulo de potência IGBT e módulo de pré-carga.
A figura 6 é referente a um esquema funcional de um inversor de frequência PWM:
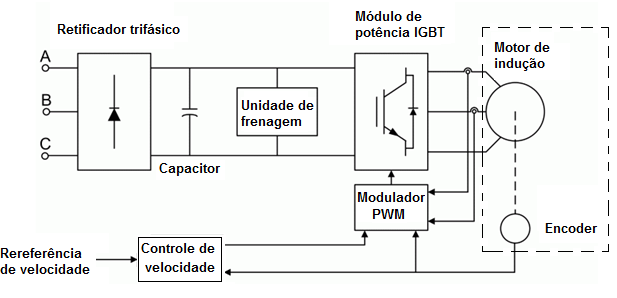
Figura 6: Inversor de frequência PWM
Fonte: (www.mathworks.com).
Retificador trifásico
Recebe a tensão alternada trifásica com frequência fixa a partir da linha de alimentação AC e a converte para uma tensão contínua pulsante, podendo receber o nome de retificador não controlado com 06 diodos, semi-controlado com 03 diodos e 03 tiristores ou totalmente controlado com 06 tiristores, conforme configuração adotada.
As figuras 7, 8 e 9 apresentam os retificadores trifásicos não controlado, semi controlado e totalmente controlado, respectivamente:
Figura 7: Retificador trifásico não controlado
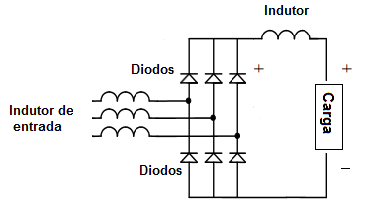
Fonte: (Adaptado de CRESTANI, 1994).
Figura 8: Retificador trifásico semi controlado
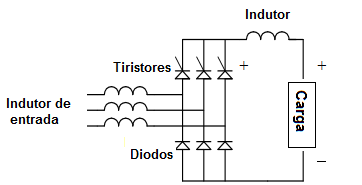
Fonte: (Adaptado de CRESTANI, 1994).
Figura 9: Retificador trifásico totalmente controlado
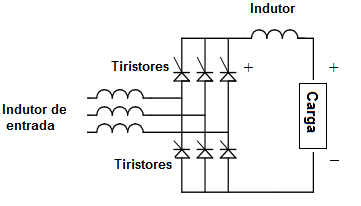
Fonte: (Adaptado de CRESTANI, 1994).
6.9.1. Barramento CC
Recebe a tensão pulsante do retificador CC, filtrando-a para fornecer uma tensão continua pura para o inversor. Isto é comumente chamado de tensão do link DC. Este tipo de circuito utiliza um banco de capacitores para filtro. O conjunto de capacitores no barramento CC ou LINK DC tem a função de minimizar as ondulações geradas pelo circuito retificador que também são chamadas de ripple. Os capacitores filtro reduzem as ondulações da tensão, enquanto que indutores minimizam as ondulações da corrente (SILVA, 2009).
6.9.2. Unidade de frenagem
Segundo Theisen (2009), durante um comando de parada ou desaceleração, o rotor de um motor de indução está girando em uma velocidade muito mais alta do que a referência comandada pelo inversor. Quando isso acontece, o motor passa a transformar a energia mecânica obtida a partir do eixo de acionamento do próprio motor em energia elétrica disponível. Essa energia tende a ser transferida de volta para o barramento CC. Esse excesso de energia faz com que a tensão do barramento CC possa aumentar e causar uma sobretensão do circuito CC.
Quando os inversores de frequência operam com somente uma ponte retificadora direta com diodos, esse excesso de energia deve ser dissipado em um resistor de frenagem através do chaveamento dos IGBTs da unidade de frenagem.
O método de frenagem dinâmica usa um circuito de detecção de tensão para monitorar o barramento CC. Quando a tensão barramento CC aumenta sua amplitude para o nível Vdc_on e o IGBT do freio será ligado e permanecerá ligado até que a tensão diminua para o nível Vdc_off, conforme a figura 10:
Figura 10: Gráfico controle de tensão no barramento CC durante a frenagem dinâmica
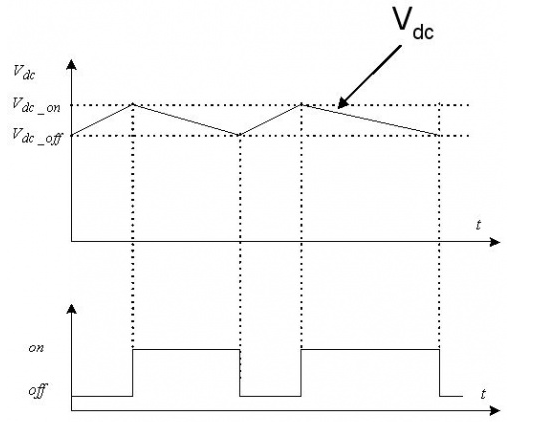
Fonte: (www.mrplc.com/kb/Principle-of-Operation-Dynamic-Braking_87.html).
6.9.3. Modulador PWM-CPU
É o circuito onde todas as informações (parâmetros e dados do sistema) estão armazenadas, visto também que existe uma memória integrada a esse conjunto. A CPU não apenas tem os dados armazenados e a parametrização relativos ao equipamento, como também executa a função mais importante para o funcionamento do inversor de frequência: monitoração do estado de funcionamento do equipamento e a geração dos pulsos de disparo, por meio de uma lógica de controle adequada, para os IGBTs.
6.9.4. Módulo de potência IGBT
Segundo Silva (2009), os transistores IGBT operam como chaves "liga ou desliga", o formato de onda da tensão de saída do inversor de frequência PWM é sempre quadrada. Para obter uma tensão de saída mais aproximada da senoidal, os transistores chaveiam modulando sua largura de pulso utilizando uma técnica chamada PWM (Pulse-Width Modulation).
O IGBT é chaveado por um curto período de tempo, garantindo que somente uma pequena parcela de corrente chegue até o motor. O IGBT é então chaveado por períodos de tempo maiores, permitindo correntes de maior amplitude no motor até que seja atingida a corrente nominal do motor. Após isso, o IGBT é chaveado por períodos de tempo menores progressivamente, diminuindo a corrente aplicada no motor.
Quanto maior for a frequência de chaveamento, mais senoidal será o formato de onda final, embora o ruído seja aumentado expressivamente, pois será proporcional à frequência de chaveamento.
6.9.5. Módulo de pré-carga
De acordo com Silva (2009), quando um inversor de frequência é energizado uma tensão relativamente alta alimentará um circuito com capacitores filtro, esses capacitores estarão inicialmente descarregados, isso vai ocasionar em um alto pico de corrente podendo danificar o inversor, uma forma simples de controlar esta corrente é a utilização de um circuito de pré-carga que pode ser desde um simples resistor associado a um contator ou até mesmo um circuito mais complexo. Onde um circuito de controle vai energizar uma bobina que abrirá seu contato NF, obrigando a corrente passar através do resistor de pré-carga. Quando o circuito estiver em regime permanente, o circuito de controle bloqueia a corrente da bobina, fechando seu contato que será o novo caminho para a corrente elétrica.
O diagrama de um circuito de pré-carga está representado na figura 11:
Figura 11: Circuito de um módulo de pré-carga utilizado em inversores de frequência PWM
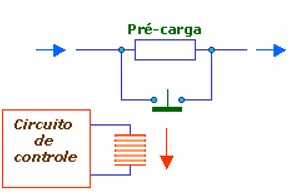
Fonte: (SILVA, 2009).
6.10. MODOS DE CONTROLE UTILIZADOS EM INVERSORES PWM VSI
Fundamentalmente, e de modo geral, existem duas técnicas de controle conhecidas, que podem ser ordenadas nas seguintes categorias principais: controle escalar e controle vetorial (MENDES, 2005).
Segundo Pires (2006), o controle escalar é baseado no conceito primário do inversor de frequência em que é imposta para o motor uma determinada tensão/frequência, procurando manter a relação V/f constante, ou seja, permitindo o motor trabalhar com fluxo aproximadamente constante.
É muito utilizado quando não há necessidade de respostas rápidas a comandos precisos de torque e velocidade, e é preferencialmente usado quando há conexão de múltiplos motores a um único inversor. O controle é realizado em malha aberta e a precisão da velocidade é função do escorregamento do motor, que varia em função da carga, já que a frequência no estator é imposta. Para melhorar o desempenho do motor em baixas rotações, alguns fabricantes oferecem inversores com funções especiais como o reforço e o Boost de tensão (PIRES, 2006).
De acordo com Mendes (2005), o controle vetorial consiste no princípio de funcionamento da transformação de componentes trifásicas para um referencial dinâmico, que, uma vez orientado conforme um dos vetores de fluxo magnético da máquina, este tipo de controle permite atingir um elevado grau de precisão e resposta rápida de controle de binário e de velocidade do motor.
Ainda segundo Mendes (2005), o controle vetorial decompõe a corrente do motor em dois vetores: um que gera um fluxo magnetizante e outro que produz torque, controlando separadamente o torque e o fluxo. O controle vetorial se apresenta em malha aberta ou “sensorless” (sem encoder), e em malha fechada operando com realimentação por encoder ou gerador de pulsos.
7. MODOS DE FALHAS EM INVERSORES DE FREQUÊNCIA PWM E METÓDOS PARA ANÁLISE E DIAGNÓSTICO
7.1. CONCEITOS SOBRE FALHAS, MODOS DE FALHAS, DIAGNÓSTICOS E DEFEITOS.
O termo falha se refere a uma redução total ou parcial da capacidade de desempenho de um componente, equipamento, processo ou sistema para atender uma determinada função durante um determinado período de tempo. As falhas podem ser classificadas como paramétricas e catastróficas. Uma falha paramétrica é o desvio de um parâmetro do sistema no tempo ou devido condições ambientais que o levam a admitir um valor fora do especificado como nominal. Quando é observado um desvio grande e imediato do valor esperado do parâmetro tem-se uma falha catastrófica ou estrutural.
Para Morais (2004), a detecção de uma falha tem por finalidade principal descobrir se existe o aparecimento de uma falha incipiente na máquina. Existem dois métodos distintos para detecção da falha, por comparação com um modelo referenciado ou através da obtenção das características de funcionamento com o reconhecimento de padrões da máquina analisada.
Modo de falha como sendo: “a forma do defeito”, “maneira na qual o defeito se apresenta”, “maneira com que o item falha ou deixa de apresentar o resultado desejado ou esperado”, “é um estado anormal de trabalho, a maneira que o componente em estudo deixa de executar a sua função ou desobedece às especificações” (SAKURADA, 2001, p.49).
Segundo Souza (2008), um defeito pode ser definido como uma anomalia em um equipamento que pode levar o mesmo a operar de forma irregular e/ou aquém de sua capacidade nominal, de forma que, se este não for reparado a tempo, poderá evoluir e levar a máquina a falhar e ser retirada de serviço. O defeito em equipamentos é aquele que tem sua origem ocasionada por fenômenos térmicos, químicos, elétricos, magnéticos e mecânicos.
Diagnóstico de falhas: A detecção de sinais anormais era comumente realizada por especialistas ou análises off-line, e agora passaram a ser implementadas on-line e automaticamente por computador, através de tecnologia avançada. O resultado esperado, que seria apresentado ao usuário, incluiria o nome e localização de cada defeito, status da máquina e avisos sobre possíveis manutenções (MORAIS, 2004, p.3).
7.2. CLASSIFICAÇÃO DAS FALHAS EM INVERSORES DE FREQUÊNCIA PWM
Segundo Foito (2015), as falhas nos circuitos eletrônicos de potência do inversor PWM podem ser classificadas em: falhas de IGBT, falhas no barramento CC e capacitores, falhas no retificador e falhas no circuito de comando e controle.
7.2.1. Falhas de IGBT
De acordo com Motoki (2008), grande parte dos inversores de frequência opera em regimes que requerem variação de velocidade rápida, paradas, partidas e sobrecargas constantes. Os circuitos que dependem de chaveamento, particularmente dispositivos com comutação de semicondutores, estão sujeitos a um constante esforço como elevação de corrente e surtos de tensão. Embora sejam usados circuitos de amortecimento com indutores e filtro com capacitores. Podem acontecer falhas como curto circuito de um diodo, que é fundamental para o circuito de alimentação CC de um inversor, ou da propria unidade de potência IGBT que possui dispositivos com controle de chaveamento PWM que podem ser danificados.
A figura 12 é referente a um módulo IGBT sem defeitos eletrônicos:
Figura 12: Módulo IGBT em perfeito estado de conservação
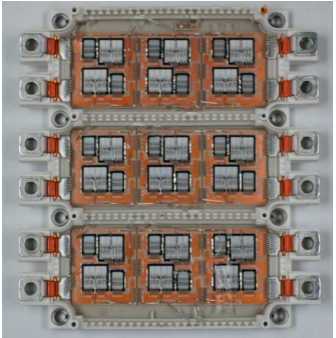
Fonte: (DAS; PECHT; VALENTINE, 2015).
A figura 13 é referente a um módulo IGBT danificado:
Figura 13: Módulo IGBT queimado, danificado por fuga térmica em um experimento cientifico.
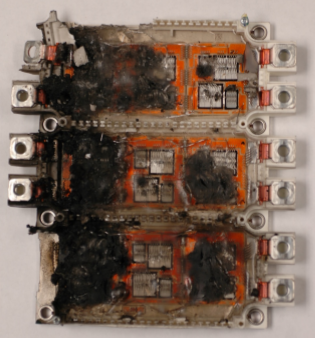
Fonte: (DAS; PECHT; VALENTINE, 2015).
Falhas no inversor podem ter origem a partir de componentes eletrônicos defeituosos, e isto, novamente, pode ser um resultado de avarias no sistema de arrefecimento, intempéries ou utilização de materiais impróprios.
Danos ocorridos na unidade de potência IGBT podem também danificar outros componentes associados como barramentos flexíveis, conectores e capacitores de amortecimento.
A figura 14 apresenta o circuito de um módulo de potência IGBT e outros componentes danificados:
Figura 14: Módulo de potência IGBT danificado juntamente com outros componentes associados.
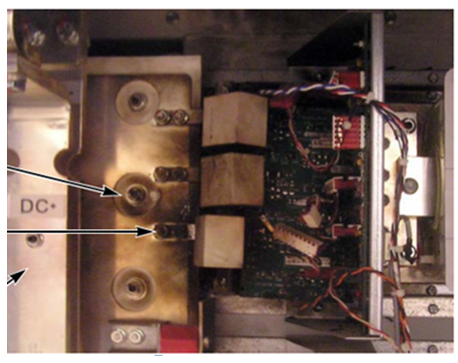
Fonte: (ROCKWELL AUTOMATION, 2013)
Em diversas situações, quando surge uma determinada falha, pode ocorrer que apenas um dos semicondutores seja danificado e, consequentemente, apenas uma das fases de saída do inversor de frequência fique alterada. No entanto, se o problema não for ligeiramente diagnosticado e isolado, podem surgir danos em outros dispositivos semicondutores ou respectivos circuitos de controle se o equipamento não for retirado de operação ou for religado por diversas vezes, podendo levar a uma falha geral do acionamento (MENDES, 2005).
7.2.2. Falhas no barramento CC e capacitores
Segundo Sood (2016), geralmente o barramento CC é composto por um banco de capacitores eletrolíticos. Os capacitores podem falhar por vários motivos, entre eles estão a evaporação do eletrólito devido ao envelhecimento, outras causas de insucesso para condensadores eletrolíticos de alumínio incluem a degradação das propriedades químicas do eletrólito, o que pode levar a um aumento da resistência em série equivalente ou causar a degradação da camada de óxido sobre o ânodo. Entre as outras razões que um capacitor pode ser danificado estão também:
- Sobretensão ou transientes podem levar à ruptura dielétrica do capacitor;
- Tensões mecânicas, incluindo choque ou vibração, levando a deformação física que também pode afetar o selo eletrólito, as ligações elétricas, ou a integridade do óxido armazenado;
- A exposição à temperatura excessivamente alta ou baixa no ambiente;
- Armazenamento prolongado, levando a degradação óxido;
- Entrada de contaminantes levando à degradação do selo ou corrosão.
Na tabela abaixo são vistos alguns modos de falha em capacitores de alumínio e seus respectivos fatores de contribuição:
Tabela 1: Possíveis modos de falhas em capacitores eletrolíticos
|
Modos de falha |
Fatores de contribuição |
|
Ruptura da isolação;
Deterioração da camada de óxido. |
Ondulação excessiva (ripple) de tensão levando a alta temperatura; Sobretensão ou transientes elétricos; Eletrólito com pH acima de 8 ou inferior a 5 ausência de fosfatos no eletrólito; Carga e descarga excessiva. |
|
Curto circuito direto entre eletrodos. |
Fragmentos ou partículas de metal; Danos ao separador de papel; Choque Mecânico /vibração. |
|
Corrosão do eletrodo e guia.
|
Infiltração de halogéneos (Fluor ou Cloro). |
Fonte: (Adaptado de SOOD, 2016).
7.2.3. Falhas no retificador
De acordo com Foito (2015), no retificador as falhas estão normalmente ligadas ao diodo, caso este componente apresente uma falha do tipo circuito aberto ou um curto-circuito. As falhas em que o diodo para de conduzir muitas vezes não apresentam consequências mais graves para o acionamento gerando apenas uma limitação no valor da tensão no barramento CC.
Já uma falha em que o diodo se encontra conduzindo em ambos os sentidos resulta em um curto-circuito entre fases da rede de alimentação, o que se trata de uma situação mais severa do ponto de vista da integridade dos equipamentos. As causas possíveis de falha nos díodos de potência estão na maioria das vezes relacionadas com o seu funcionamento em condições muito críticas com tensões e correntes muito elevadas.
7.2.4. Falhas no circuito de comando e controle
Segundo Foito (2015), o circuito de comando e controle é responsável por comutar o estado de condução dos semicondutores de potência em cada momento, isto é, dá origem a ordem de condução ou bloqueio para cada semicondutor. Muitas vezes, devido às tensões elevadas usadas no circuito de potência, o circuito de comando deve garantir o isolamento galvânico entre o próprio circuito de comando e controle e o circuito de potência do conversor. Um sistema com acoplador óptico é usado como solução mais econômica que consiste num díodo emissor de luz (LED) e num foto transistor, sensível às alterações espectrais da fonte emissora.
As falhas neste acoplador estão geralmente associadas ao processo de envelhecimento do foto transistor. Com o passar do tempo, o efeito da temperatura acaba interferindo na transmissão do sinal do circuito de controle ao semicondutor, fazendo com que este permaneça no estado aberto, conclui Foito (2015).
7.3. MECANISMOS DE FALHAS
Kadaník (1998) observou que é possível individualizar duas categorias diferentes de modos de falha em componentes eletrônicos. A primeira categoria inclui mecanismos de falha relacionados com as sobrecargas elétricas e a segunda está ligada aos mecanismos de falha ao longo prazo.
7.3.1. Mecanismos de falhas relacionados a sobrecargas elétricas
Quando o inversor de frequência opera com uma sobrecarga elétrica, o dispositivo é conduzido para fora da área de operação segura e, geralmente, as sobretensões e sobrecorrentes são as causas diretas das alterações imediatas na estrutura de um dispositivo semicondutor, resultando em falhas de maior dimensão como a queima do componente eletrônico.
Tabela 2: Mecanismos de falha devido a sobrecargas elétricas
|
Mecanismos de falha |
Causador |
|
Corrente de Ruptura. No entanto o aquecimento causado pela corrente de ruptura elevada faz com que o diodo seja danificado a menos que haja dissipação de calor suficiente. |
Densidade de corrente; Temperatura Ambiente |
|
Rachaduras térmicas. |
Potências dissipadas; Temperatura Ambiente.
|
|
Tensão de Ruptura. A tensão de ruptura é a tensão mínima necessária para forçar um isolante para conduzir certa quantidade de energia elétrica, quando este valor é ultrapassado o isolamento pode ser danificado. |
Campo elétrico; Temperatura Ambiente. |
Fonte: (Adaptado de KADANÍK, 1998).
7.3.2. Mecanismos de falha relacionados ao longo prazo
Ainda conforme Kadaník (1998), na segunda categoria de falha, alguns mecanismos de falha ao longo prazo estão relacionados com o aspecto intrínseco de um componente e pode ser visto como um efeito de fadiga. Por exemplo, sabe-se que, devido aos fluxos de corrente na estrutura interna de um dispositivo semicondutor, é possível que ocorra uma alteração das propriedades de estrutura do elemento, mesmo se o dispositivo continua a funcionar, mas com caracteristicas elétricas e parâmetros alterados.
Um exemplo de falha ao longo prazo é a eletromigração, uma vez que os semicondutores são formados por cristalinos de média condutividade elétrica, através de uma corrente elevada pode ser formado um filamento condutor fazendo uma ponte em ambos os sentidos entre os terminais ânodo e catodo causando um curto-circuito (SOOD, 2016).
A figura 15 é referente à ampliação da imagem de um semicondutor danificado apresentando eletromigração:
Figura 15: Semicondutor danificado apresentando eletromigração
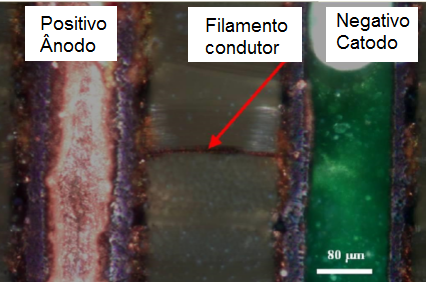
Fonte: (SOOD, 2016).
Tabela 3: Mecanismos de falha relacionados ao longo prazo
|
Mecanismos de falha |
Causador |
|
Corrosão: Um dispositivo encapsulado em uma embalagem hermética apresenta problemas de corrosão. Devido à corrosão padrões de metalização pode abrir. |
Umidade |
|
Eletromigração: Como é bem conhecido, em dispositivos eletrônicos com alta densidade de corrente, é possível observar os átomos do metal que flui no sentido electrões. Isto irá resultar em alterações na geometria dos condutores e formalmente na abertura do circuito ou em um filamento. |
Densidade da corrente; Temperatura Ambiente |
|
Difusão Secundária: Em um dispositivo semicondutor, devido aos gradientes de dopantes internos e os contatos entre materiais diferentes, é possível observar os efeitos secundários de difusão. Estes efeitos ocorrem especialmente em situações em que a temperatura se encontra elevada quando comparada com a condição de temperatura operacional. O resultado é um desvio em parâmetros do dispositivo que podem levar a uma falha da unidade onde o componente está sendo utilizado. |
Temperatura Ambiente; Dissipação de potência.
|
|
Fadiga térmica: Para os dispositivos que funcionam como dispositivos de comutação, uma das principais falhas é a fadiga térmica. Em particular, os efeitos dos ciclos térmicos afetam a junta de solda, conduzindo ao aumento da resistência de contato/acoplamento e, em seguida, para uma fenda mecânica ou ruptura do componente. |
Ciclos térmicos. |
Fonte: (adaptado de KADANÍK, 1998).
7.4. CLASSES DE FALHAS EM INVERSORES DE FREQUÊNCIA PWM
Alguns fabricantes de inversores de frequência classificam as falhas em classes, sendo uma falha Classe 1 definida como mais severa e falha Classe 2 de menor impacto para o equipamento. Isso, portanto, vai influenciar o modo que o equipamento será desligado caso ocorra alguma anomalia.
7.4.1. Falhas de Classe 1
Para falhas de Classe 1, a unidade de retificação é deixada imediatamente em fase para reduzir a corrente do circuito até que a mesma diminua a zero. O disparo dos conversores é desabilitado, e então o circuito de entrada é aberto. Nesse momento, haverá a parada por inércia do motor e sua velocidade passará a depender das características da carga. Para algumas cargas de alta inércia, o motor pode parar por inércia durante um grande período de tempo (ROCKWELL, 2013).
7.4.2. Falhas de Classe 2
Nas falhas de Classe 2, o motor desacelera com uma parada normal antes do disparo ser desligado e do circuito de entrada ser aberto. Os casos típicos de falhas Classe 2 são sobrecarga do motor, sobrecarga do inversor e perda de carga. Para a maioria das advertências não é tomada nenhuma ação, e o inversor continua sua operação normal. Uma advertência pode ser a indicação de uma perda de desempenho do inversor, ou seja, um exemplo de advertência seria uma indicação de que um filtro de ar da unidade está obstruído (ROCKWELL, 2013).
7.5. CIRCUITO CONVENCIONAL DE PROTEÇÃO DE UM INVERSOR DE FREQUÊNCIA PWM
De acordo com Kadaník (1998), o circuito convencional de um inversor de frequencia PWM, em alguns casos, apresenta um disjuntor de entrada para proteção contra sobrecorrente da unidade. Os fusíveis de entrada são destinados a proteger contra uma falha de curto-circuito do retificador ou da ligação do capacitor ao barramento DC. Transdutores de tensão são usados para monitorar a tensão no LINK DC, um relé termico protege o motor. O excesso de temperatura do módulo de potência é protegido por termostatos.
Figura 16: Inversor de frequência PWM Convencional VSI
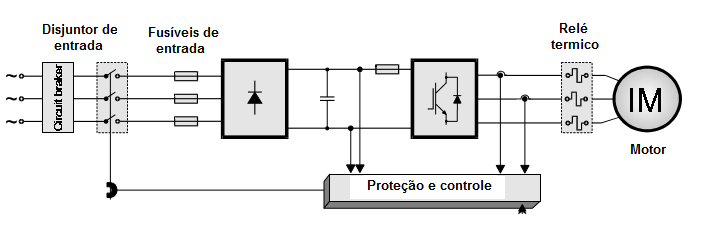
Fonte: (adaptação de KADANÍK 1998).
O sistema de proteção, como discutido na figura 16, muitas vezes não consegue julgar criticamente a gravidade de uma falha, e por isso não pode fornecer uma adequada proteção. Esta observação justifica e confirma que uma investigação do modo de falha sistemática com técnicas de detecção de falha adequadas que possam garantir uma maior confiabilidade no processo industrial no qual a máquina está inserida (KADANÍK, 1998).
7.6. MÉTODOS PARA DIAGNÓSTICO DE FALHAS
Para Silva (2008), a tarefa de diagnosticar uma falha compreende na determinação do tipo da falha com todos os detalhamentos possíveis, como dimensão da falha, localização e horário de detecção. A metodologia de diagnóstico de falhas se baseia nos sintomas analíticos e heurísticos observados no processo que pode ser muito bem representada na figura 17:
Figura 17: Esquema geral do diagnóstico de falhas
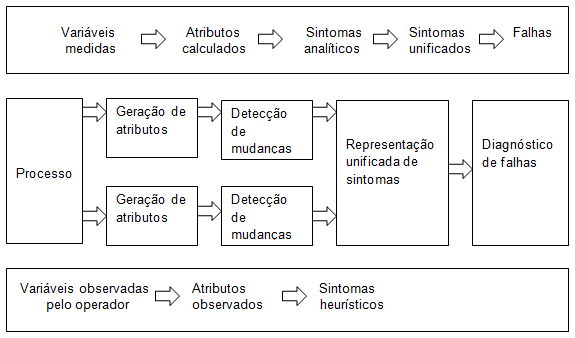
Fonte: (SILVA, 2008)
Os sintomas analíticos são os resultados das verificações dos limites dos sinais medidos ou os resultados da detecção de faltas. Enquanto os sintomas heurísticos são as observações do pessoal de operação na forma de ruído acústico, oscilações ou impressões ópticas como cores ou fumaça, que podem ser obtidos por meio de inspeção. Esses sintomáticos podem geralmente ser representados na forma de medidas qualitativas, como expressões linguísticas do tipo “pouco”, “médio” ou “muito” (SILVA, 2008).
Segundo Rodrigues (2010), o acompanhamento estatístico do processo mostra os pontos que possuem maior probabilidade de causar falhas e consequentemente a parada do equipamento. A ocorrência classifica a probabilidade de uma falha acontecer, considerando os controles de prevenção quando existentes. Geralmente utiliza-se o conhecimento prévio de um engenheiro, que considera a ocorrência de falhas em situações semelhantes já ocorridas. Estes dados podem ser mapeados e distribuídos por componente funcional ou por bloco constituinte conforme a figura 18:
Figura 18: a) Distribuição por componente funcional e b) Distribuição por bloco constituinte
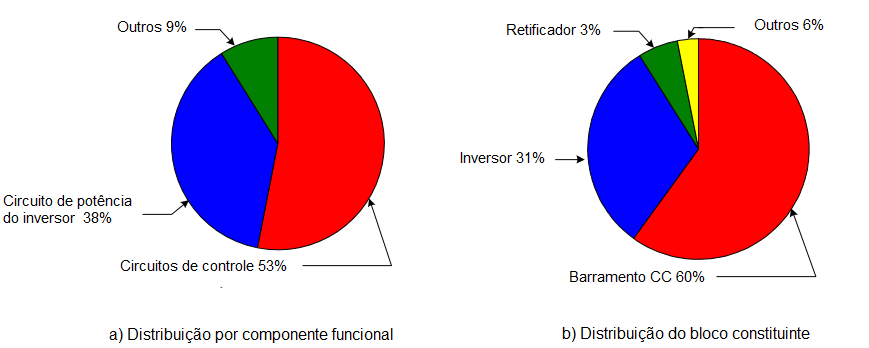
Fonte: (FOITO, 2015).
8. ANÁLISE DOS MODOS DE FALHA EM INVERSORES DE FREQUÊNCIA PWM COM A APLICAÇÃO DE LÓGICA FUZZY
Segundo Kadaník (1998), um engenheiro experiente pode detectar e diagnosticar as falhas de um circuito, verificando as medições de corrente, tensão e o desempenho do sistema. No entanto, não são apenas esses peritos escassos que podem realizar tal função. O conhecimento do perito do sistema consiste da base de dados e regras.
Os sistemas especialistas contêm uma base de conhecimento com habilidade heurística obtida a partir de uma metodologia de raciocínio de um especialista humano. Entre os sistemas especialistas, destaca-se o uso da lógica Fuzzy para identificar os modos de falhas.
8.1. HISTÓRIA DA LÓGICA FUZZY
Os princípios de lógica Fuzzy foram elaborados primeiramente por Jan Lukasiewicz (1878-1956), que, em 1920, desenvolveu e estabeleceu conjuntos com grau de pertinência que, agregados aos entendimentos da lógica clássica, anteriormente por Aristóteles, deu fundamento suficiente para que, na década de 1960, o professor Lofti Asker Zadeh, professor de ciências da computação na Universidade da Califórnia, chegasse a ser o precursor de uma publicação sobre lógica Fuzzy (RIGNEL; CHENCI; LUCAS, 2011).
Em meados da década de 1960, Zadeh observou que os recursos tecnológicos disponíveis não eram suficientes para automatizar as atividades relacionadas a problemas de natureza industrial, biológica ou química que ficassem em situações ambíguas, não possíveis de processamento através da lógica computacional baseada na lógica booleana (MORAIS, 2004).
Procurando resolver esses problemas, o Prof. Zadeh publicou em 1965 um artigo com conceitos dos conjuntos Fuzzy, para lidar com limites que não possuem precisão. A pertinência em um conjunto Fuzzy não é a questão de afirmativo ou negativo, e sim o grau com que se pode afirmar alguma coisa (MORAIS, 2004).
A lógica Fuzzy é a lógica baseada na teoria dos conjuntos Fuzzy. Ela difere dos sistemas lógicos tradicionais em suas características e seus detalhes. Nesta lógica, o raciocínio exato corresponde a um caso limite do raciocínio aproximado, sendo interpretado como um processo de composição de relações nebulosas (GOMIDE; GUDWIN; TANSCHEIT, 1995, p.01).
8.2. CONJUNTOS FUZZY
De acordo com Tanscheit (2003), na teoria clássica dos conjuntos, o conceito de pertinência de um elemento a um conjunto fica bem definido conforme a descrição que em um conjunto A em um universo X, os elementos deste universo podem ou não pertencer àquele conjunto. Isto pode ser demostrado pela função característica:
Zadeh (1973) propôs uma classificação mais ampla, generalizando a função característica da maneira que ela pudesse assumir um número infinito de valores no intervalo [0,1]. Um conjunto Fuzzy A em um universo x é expressado por uma função de pertinência.
8.2.1. Números Fuzzy
De acordo com Sousa (2005), os números Fuzzy e conjuntos Fuzzy, em alguns casos especiais, são entidades que podem ter o mesmo significado. Um número Fuzzy N pode ser expressado como N = (α, c), onde α é o número Real que coincide com o valor central de N. A constante c é a distância entre α e os pontos da Reta dos números Reais que possuem possibilidade nula mais aproximados de α. A função de pertinência pode ser representada da seguinte maneira:
A função L(x) é chamada de função de referência, e possui as seguintes características:
1) L(x) = L(-x), L(x) é linear ;
2) L(0) = 1 ;
3) L(x) é decrescente no intervalo [0, ∞].
8.2.2. Caracteristicas dos números Fuzzy
A primeira característica garante que a função é linear e simétrica em comparação ao eixo vertical. A segunda confirma que o ponto de pertinência máxima coincide com o eixo de simetria; e a terceira confirma que a função é decrescente ao lado direito do eixo de simetria. É precisamente a simetria que confirma que é crescente ao lado esquerdo.
Segundo estas características, verifica-se que a função de referência apresenta a forma de um triângulo isósceles, com o vértice formado pela interseção dos lados iguais do triangulo com o eixo vertical no ponto (0,1).
A figura 19 é referente a uma representação do número Fuzzy “próximo de 10”:
Figura 19: Representação do número Fuzzy “próximo de 10”
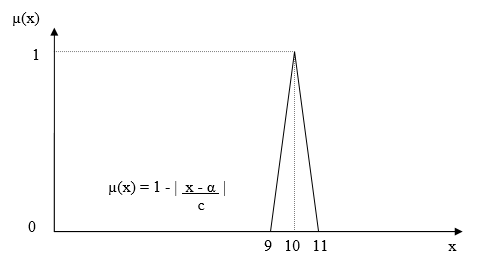
Fonte: (SOUSA, 2005).
Ao ser obtida a função de pertinência, com a substituição dos valores de α e c, pode ser verificado que o valor de α se move horizontalmente no triângulo até o ponto em que se encontra este valor sobre a Reta, e que o valor de c altera a inclinação das retas, complementou Sousa (2005).
8.3. VARIÁVEIS LINGUÍSTICAS
Uma variável linguística é uma variável cujos valores são nomes de conjuntos Fuzzy. A temperatura de um determinado processo, por exemplo, pode ser uma variável linguística admitindo os valores “baixa”, “média” e “alta”. Estes valores são representados por intermédio de conjuntos Fuzzy, descritos por funções de pertinência. De forma geral, os valores de uma variável linguística podem ser sentenças em uma linguagem especificada, criadas a partir de termos primários e de conectivos lógicos (negação não, conectivos E e OU), de termos modificadores (muito, pouco, levemente e extremamente) e delimitadores (TANSCHEIT, 2003).
A figura 20 apresenta as funções de pertinência para uma variável de temperatura:
Figura 20: Funções de pertinência para a variável temperatura
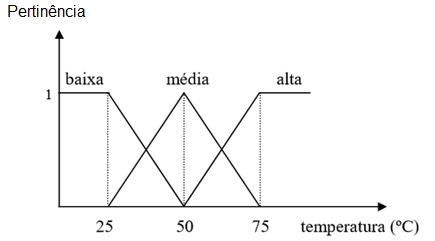
Fonte: (TANSCHEIT, 2003).
8.4. ESTRUTURA DE UM PROCESSO CONTROLADO POR LÓGICA FUZZY
De acordo com o trabalho de Gomide, Gudwin e Tanscheit (1995), a estrutura e o diagrama de blocos de um processo manipulado por um controlador Fuzzy podem ser bem representados enfatizando-se seus componentes necessários: a interface de Fuzzyficação, a base de conhecimento, a base de dados, o procedimento de inferência e a interface de deFuzzyficação
A figura 21 se refere ao diagrama de blocos de um controlador Fuzzy:
Figura 21: Diagrama de blocos de um controlador Fuzzy
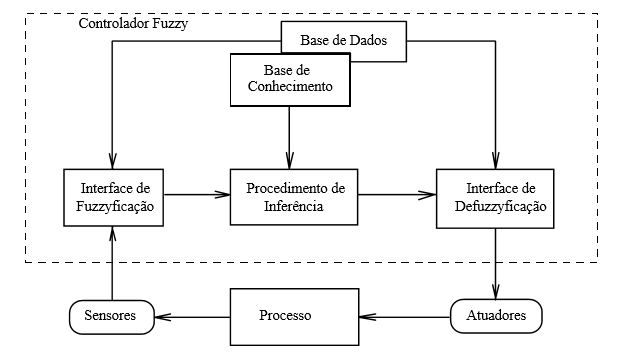
Fonte: (GOMIDE; GUDWIN; TANSCHEIT, 1995).
A interface de Fuzzyficação toma os valores das variáveis de entrada, os condicionam os valores a dimensões de raciocínio normalizados e Fuzzyfica os valores, transformando números em conjuntos Fuzzy, de modo que possam se tornar aproximações de variáveis linguísticas. A base de conhecimento vem de uma base de regras, caracterizando a estratégia de controle e seus objetivos.
A base de dados armazena as definições necessárias quanto a valores discretos, as partições Fuzzy dos espaços de entrada e saída e as definições das funções de pertinência. O procedimento de inferência processa os dados Fuzzy de entrada, junto com as regras, de modo a deduzir as ações de controle Fuzzy.
A interface de deFuzzyficação converte as ações de controle Fuzzy inferidas em ações de controle não-Fuzzy de modo a deixar compatíveis os valores normalizados vindos do passo anterior com os valores dos universos de discurso reais das variáveis, concluem Gomide, Gudwin e Tanscheit (1995).
8.5. APLICAÇÕES DA LÓGICA FUZZY
De acordo com Sousa (2005), inicialmente, o interesse em aplicar sistemas Fuzzy foi iniciado pelos japoneses Seiji Yasunobu e Soji Miyamoto, em 1985, desenvolvendo simulações de sistemas Fuzzy em uma via férrea de Sendai. Logo depois, foram apresentadas várias aplicações de controladores mecânicos/computacionais, tais como:
- Aspiradores de pó Matsushita, que usam controladores de 4 bits rodando ritmos de sensores de pó e regulando o modo de sucção;
- Máquinas de lavar Hitachi, com controladores Fuzzy para controle de peso, reconhecimento do tipo de tecido e sensores de sujidade, programando de forma automática os ciclos de lavagem para o uso otimizado de potência, água e sabão;
- Câmera fotográfica fabricada pela Canon, com autofoco capaz de realizar a medição da claridade de imagens em seis pontos do campo de visão, usando os dados obtidos para determinar se a câmera está no foco;
- Ar condicionado industrial desenvolvido pela Mitsubishi, que usa 25 regras de resfriamento e 25 regras de aquecimento. Em comparação ao projeto anterior, o novo aparelho aquecia cinco vezes mais rápido, reduzindo o consumo de energia em 24% e utilizando uma menor quantidade de sensores.
8.6. MÉTODOS BASEADOS EM LÓGICA FUZZY PARA DIAGNÓSTICO DOS MODOS DE FALHA EM INVERSORES DE FREQUÊNCIA PWM
O principal objetivo desses sistemas é reproduzir artificialmente a inteligência humana e da natureza ainda não modelados de maneira fenomenológica. Como exemplo, eles são capazes de auxiliar os operadores no: diagnóstico e detecção de falhas, e na execução de procedimentos, evitando erros humanos, paradas das unidades e, principalmente, acidentes. A “inteligência” destes sistemas é obtida através da extração dos conhecimentos dos especialistas da área, pois ainda existem dificuldades para dotá-los de uma lógica de aprendizagem automática (DUARTE FILHO, 2010, p.23).
Segundo Foito (2015,) a lógica Fuzzy consiste numa aproximação que permite a interpretação e manipulação matemática de expressões verbais simples e imprecisas, comuns na comunicação humana, em representações evidentes. O tratamento dessa informação é realizado, por forma a que o conhecimento humano adquirido por experiência possa ser convertido, de uma maneira formal, para tratamento computacional.
8.6.1. Definição do método a ser utilizado
A escolha pela utilização da lógica Fuzzy ou quaisquer outros métodos de detecção e sistemas inteligentes se justifica, muitas vezes, pelo tipo de falha e ao retorno do capital investido com os custos de implantação. Os custos de prevenção são resultantes da somatória de todos os gastos associados às medidas preventivas tomadas para garantir maior competividade às empresas (PONTEL; MIGUEL, 1999).
A integração da experiência de diversos engenheiros permite estratégias para a tomada de decisão em problemas de alta complexidade, o que garante a lógica Fuzzy como um excelente método de diagnóstico de falhas elétricas e mecânicas para máquinas elétricas. Estas falhas podem estar relacionadas a causas internas e causas externas (FOITO, 2015).
A figura 22 apresenta as falhas relacionadas às causas internas:
Figura 22: Falhas relacionadas a causas internas
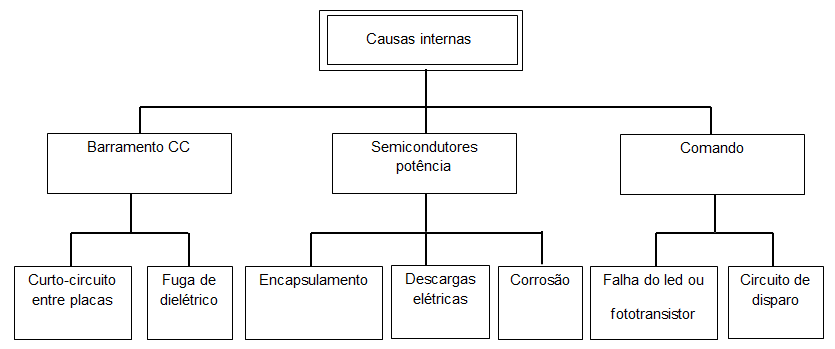
Fonte: (FOITO, 2015).
A figura 23 apresenta as falhas relacionadas a causas internas:
Figura 23: Falhas relacionadas a causas externas
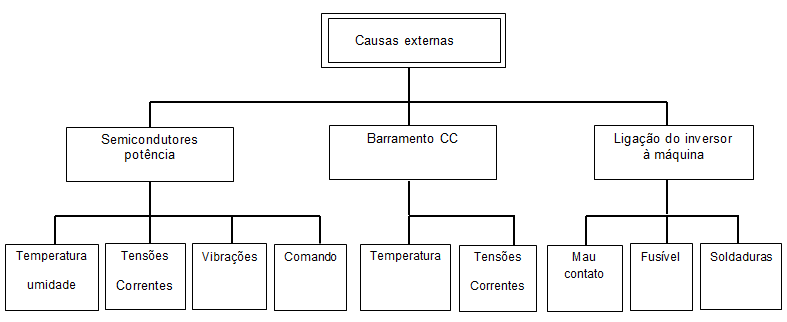
Fonte: (FOITO, 2015).
Para Cardoso Jr, Rolim e Zurn (2004), a lógica difusa constitui uma execelente ferramenta para suporte na construção de modelos completos eficientes, capazes de representar a incerteza e a imprecisão semelhantes ao raciocíınio humano, onde variáveis linguísticas relacionadas a funções de certeza são utilizadas. Os processos que se utilizam de lógica Fuzzy oferecem uma maior robustez e capacidade de generalização, facilitando a modelagem de problemas complexos, com baixo custo de solução. Estas razões abrem caminho para um aumento na escolha de sistemas baseados em lógica Fuzzy na solução de problemas em sistemas de eletrônica de potência.
Borges da Silva (2008) apresenta os métodos baseados na assinatura da corrente de um motor, reconhecimento de padrões e análise da trajetória da corrente pelo vetor de Park para identificação de falhas. Dentro deste conceito, estes métodos podem ser aplicados em circuitos comandados por inversores de frequência PWM.
8.6.2. Método baseado na assinatura de corrente de um motor
O método de identificação de falhas comparando os resultados das medições
com os modelos pré-estabelecidos pode ser realizado utilizando modelos de simulação matemática ou baseados em inteligência artificial. Para a maioria dos métodos que se baseiam na extração das características, tecnologias de processamento de sinais seriam usadas para obter assinaturas de falha ou assinaturas de condição normal de operação (MORAIS, 2004).
A figura 24 representa a ilustração da assinatura de uma falha:
Figura 24: Ilustração da assinatura de uma falha
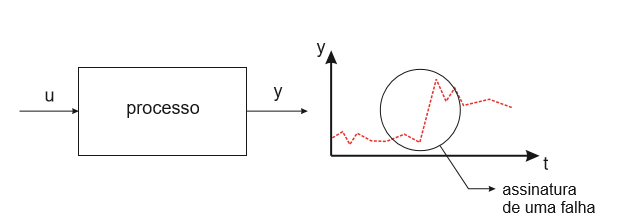
Fonte: (SILVA, 2008).
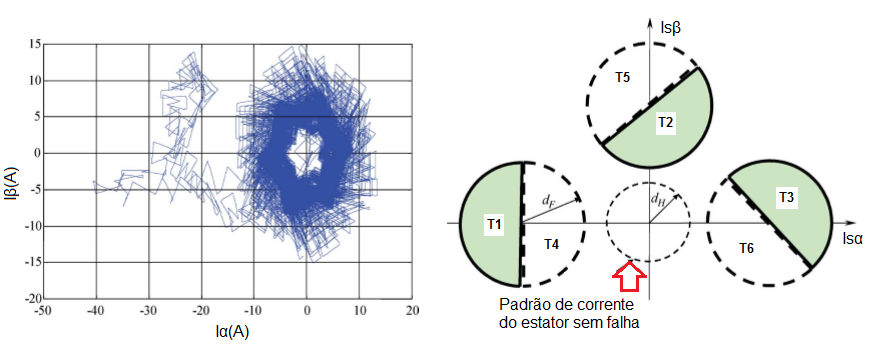
8.6.3. Método baseado no reconhecimento de padrões
Segundo Foito (2015), os métodos baseados em Wavelet-Fuzzy são usados para detectar falhas do tipo circuito aberto. Esta técnica utiliza um algoritmo de acompanhamento em tempo real das correntes em cada fase. A análise Wavelet é utilizada para identificar as alterações nas correntes. Ao apagar uma alteração nas correntes de fase, a sua componente contínua é calculada. O valor da componente contínua da corrente de fase e a sua polaridade são as entradas para um sistema de lógica Fuzzy que identifica a existência de falha do tipo circuito aberto. Este tipo de recurso se carcteriza por ser um método de reconhecimento de padrões.
A figura 25 está relacionada ao reconhecimento de um padrão de corrente sem falha:
Figura 25: Reconhecimento de um padrão de corrente sem falha
Fonte: (FOITO,2015)
8.6.4. Método de análise da corrente pelo vetor de Park
O vetor de Park é a imagem em duas dimensões usada para descrever fenômenos em um circuito trifásico de alimentação do motor de indução alimentado pelo inversor de frequência. Este método de diagnóstico se baseia nas distorções sofridas na imagem gerada chamada “círculo de Park”, que ocorrem em função do surgimento de anomalias na corrente do motor. Ultimamente, esta técnica está sendo aprimorada, englobando a análise espectral.
8.7. ANÁLISE DE CASOS DE FALHAS EM INVERSORES PWM APLICANDO LÓGICA FUZZY
Conforme experimentos realizados por Fuchs (2003), utilizando-se da lógica Fuzzy, foram por ele analisados casos de falhas em semicondutores do circuito de potência de um inversor de frequencia PWM de fonte de tensão. Neste primeiro estudo, o caso analisado apresenta uma falha de transistor IGBT aberto. Na figura abaixo são mostradas as formas de onda de cada corrente típica no domínio do tempo:
Figura 26: Gráfico com a saída de corrente com amplitude irregular devido à falha em um IGBT.
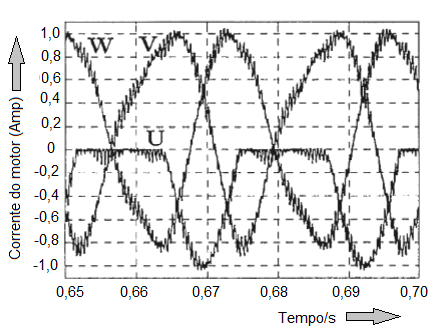
Fonte: (FUCHS, 2003).
Na figura 26 é observado que a corrente na fase “U” torna-se zero durante uma parte do período se caracterizando na forma assimétrica. O inversor de frequência continua funcionando e, devido à forma de onda de corrente irregular, o funcionamento é afetado. Através de um sistema de diagnótico Fuzzy a falha pode ser detectada e, como consequência, uma parada para intervenção de emergência deverá ser realizada para reparar o equipamento antes de maiores consequências.
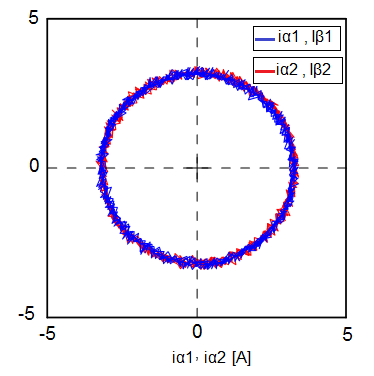
Na figura 27, é mostrada a imagem do círculo com os vetores α e β, o método com o vetor de Park para as correntes é utilizado para encontrar um transistor defeituoso:
Figura 27: Imagem do círculo com os vetores β, α e a posição relativa de cada semicirculo representando os transistores T1, T2, T3, T4, T5 e T6.
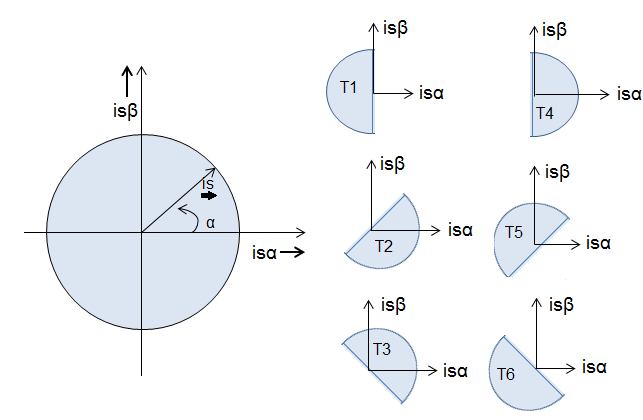
Fonte: (FUCHS, 2003).
No caso de um transistor aberto, o mecanismo Fuzzy irá identificar um desvio da trajetória vetorial da corrente no espaço reconhecendo um padrão típico de erro, representado por um semicírculo. A posição relativa do semicírculo é caracterizada por um transistor apresentando defeito, neste caso o transistor T2 representado na figura 28:
Figura 28: Imagem gráfica com um desvio de trajetória da corrente de T2.
Fonte: (FUCHS, 2003).
Ainda de acordo com Fuchs (2003), o método mais indicado para análise e reconhecimento de falhas de circuito aberto em semicondutores de potência é o método por assinatura de corrente no domínio de tempo ou espaço com representação em vetores e reconhecimento de padrões.
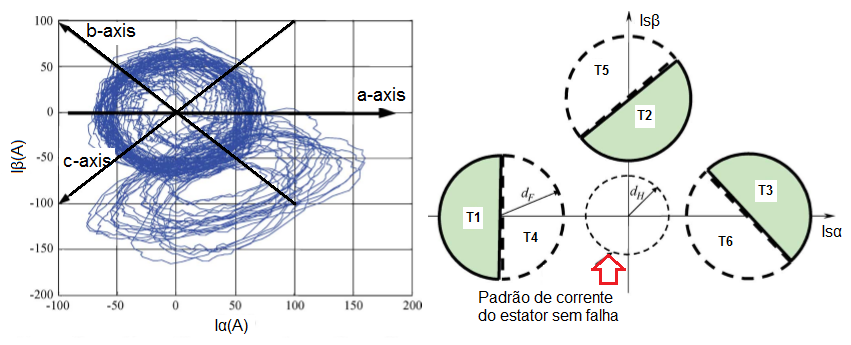
Segundo Zidani et al. (2008), quando ocorre um desvio na regulação, fazendo com que as correntes de linha não possam seguir a referência, é possível reconhecer uma falha. Para uma falha de circuito aberto, usa-se o desvio para calcular as componentes β e α. O Controle PWM faz com que a frequência da rede varie periodicamente. O desvio máximo fornece informações para localizar um componente defeituoso.
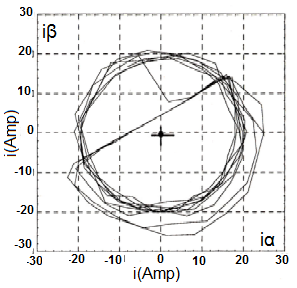
O padrão de falha simulado por Zidani et al (2008) na figura 29 aplica um sistema de lógica Fuzzy para a identificação de falha. Onde a representação gráfica não é, obviamente, um círculo. Esta representação se difere dos outros padrões de α e β. Neste caso em questão, o IGBT T1 está falhando, produzindo uma forma de corrente assimétrica.
Figura 29: Imagem gráfica com um desvio de trajetória da corrente de T1.
Fonte: (Adaptação de ZIDANI et al, 2008).
No próximo exemplo de Zidani et al. (2008), são representadas, esquematicamente, as trajetórias atuais do vetor nos modos defeituosos. A trajetória atual mostra um padrão de falha típico formando um semicírculo imperfeito. Sua posição relativa caracteriza o IGBT T2 defeituoso. Portanto, para transistores do circuito alimentação de um inversor PWM com circuito aberto poderá ser utilizada a detecção e diagnóstico com abordagem Fuzzy, sendo baseado no padrão de corrente de saída do inversor. No quadro da figura 30, é mostrada a atual trajetória da corrente antes e depois da falha do IGBT T2:
Figura 30: Imagem gráfica com um desvio de trajetória da corrente de T2.
Fonte: (Adaptação de ZIDANI, 2008).
A partir da análise das correntes, os padrões são calculados como representado na Figura 29, onde a trajetória superior representa o caso normal de funcionamento. Na parte inferior, é representado um ligeiro deslocamento do padrão de corcordia e revela uma falha intermitente. Em comparação com as condições normais, o deslocamento é ao longo do eixo α. A atual trajetória padrão é então usada para localizar um IGBT defeituoso.
8.8. VIABILIDADE PARA IMPLANTAÇÃO DE UM SISTEMA DE DIAGNÓSTICO FUZZY EM UMA PLANTA
Na revista norte-americana Maintenance Technology, ligada ao ramo de tecnologia e manutenção, Poling (2016) faz uma referência entre uma planta com operação de baixo desempenho, caracterizada por uma elevada falta de fiabilidade e alto custo de manutenção, e outra planta com excelentes resultados operacionais.
A gama de desempenho em custo de manutenção como uma percentagem do valor da planta de substituição (PRV), ou custo de manutenção total por valor patrimonial de substituição, é de menos de 1% para o melhor desempenho e mais de 15% para os piores desempenhos.
Para fins de ilustração, vamos supor uma redução de 1% no custo de manutenção como uma percentagem de PRV. Vamos assumir que os custos de manutenção eram 3% do PRV, mas foram reduzidos para 2% do PRV através do desenvolvimento de um programa robusto de monitoramento de falhas que facilita a ação corretiva antes de uma falha catastrófica. O aumento líquido no lucro através de custos de manutenção reduzidos, com base em uma PRV de US$ 1 bilhão, seria de US$ 10 milhões. Estudos comparativos mostraram que a diferença pode ser exponencial entre um melhor desempenho e um pior desempenho.
9. CONCLUSÃO
A aplicação dos sistemas especialistas baseados na lógica Fuzzy para análise de falhas já é uma realidade como opção para se alcançar diagnósticos mais precisos quanto aos modos de falha e a localização correta de falhas em inversores de frequência PWM. Estes sistemas possuem a habilidade análitica e heurística obtida a partir de uma metodologia de raciocínio de um especialista humano
Conhecer o princípio de funcionamento de um motor de indução assim como entender o correto funcionamento de um inversor de frequência PWM e seus principais componentes eletrônicos é fundamental para se entender as possíveis causas de falha no equipamento.
Os métodos para análise de falha quando bem utilizados levam ao aumento da disponibilidade e da confiabilidade, reduzindo tempo de parada do equipamento. Estes fatos contribuem para a crescente demanda por sistemas especialistas baseados em lógica Fuzzy para análise e diagnóstico de falhas. Entre estes se destacam os métodos da assinatura da corrente de um motor, reconhecimento de padrões e análise da trajetória da corrente pelo vetor de Park para identificação de falhas.
Apesar de mostrar se eficiente a lógica Fuzzy muitas vezes não pode substituir o homem. A integração da experiência de diversos engenheiros é o que permite formular e abastecer um banco de dados com padrões, regras e estratégias para a tomada de decisão em problemas de alta complexidade na área industrial.
A pesquisa científica abre espaço para se identificar novas discussões e pontos de vista diferentes para problemas atuais e futuros, o trabalho aqui desenvolvido pode servir como base para técnicos e engenheiros da área de manutenção e apontar tendências para pesquisas futuras.
10. REFERÊNCIAS BIBLIOGRÁFICAS
AHMED, Ashfaq. Eletrônica de Potência. São Paulo: Prentice Hall, 2000.
BORGES DA SILVA, Jonas Guedes. Aplicação da Análise de Componentes Principais (PCA) no Diagnóstico de Defeitos em Rolamentos através da Assinatura Elétrica de Motores de Indução. Dissertação (Mestrado em Ciências em Engenharia Elétrica) – Universidade Federal de Itajubá. Itajubá, 2008.
CARDOSO JR., Ghendy.; ROLIM, Jacqueline G.; ZURN, Hans H. Diagnóstico de faltas em sistemas de potência: definição do problema e abordagens via inteligência artificial. Revista Controle & Automação, vol. 15, n. 2. Abril, maio, junho/2004.
CHAPMAN, Stephen J. Fundamentos de Máquinas Elétricas. 5. ed. Porto Alegre: AMGH, 2013.
CRESTANI, M. “Com uma terceira portaria, o novo fator de potência já vale em abril”. Eletricidade Moderna, ano 22, n. 239, fev/1994.
DAS, Diganta; PECHT, Michael; VALENTINE, Nathan. Failure Mechanisms of Insulated Gate Bipolar Transistors (IGBTs). Center for Advanced Life Cycle Engineering (CALCE). University of Maryland, 2015.
FITZGERALD, A. E.; KINGSLEY JR., C.; UMANS, S. D. Máquinas Elétricas. 6. ed. Porto Alegre: Bookman, 2006.
FOITO, Daniel José Medronho. Deteção e diagnóstico de falhas em sistemas de acionamento com máquinas de indução hexafásicas. Dissertação (Doutorado em Engenharia Electrotécnica e de Computadores) - Faculdade de Ciências e Tecnologia da Universidade Nova de Lisboa. Lisboa, 2015.
FRANCHI, Claiton Moro. Inversores de Frequência: teoria e aplicações. 1. ed. São Paulo: Érica, 2011.
FRANCISCO, António M. S. Motores de Indução Trifásicos. Jan/2006.
FUCHS, Friedrich W. Some diagnosis methods for voltage source inverters
GOMIDE, Fernando A. C.; GUDWIN, Ricardo R.; TANSCHEIT, Ricardo. Conceitos fundamentais da teoria de conjuntos Fuzzy, lógica Fuzzy e aplicações. 1995.
in variable speed drives with induction machines: a survey. Kiel: University of Kiel, 2003.
KADANÍK, Petr. A Brief survey of AC Drive Fault Diagnosis & Detection. Praga: The Czech Technical University, dez/1998.
MARTINS, Orlando Saccol. Análise de viabilidade técnica-econômica para a aplicação de inversores de frequência em sistemas de bombeamento de baixa potência. Dissertação (Mestrado em Engenharia Elétrica) – Universidade Federal de Santa Maria. Santa Maria, 2006.
MENDES, André Manuel dos Santos. Análise do desempenho do motor de indução trifásico quando alimentado através de um inversor de fonte de tensão com tolerância a falhas. Dissertação (Doutorado em Engenharia Eletrotécnica) – Universidade de Coimbra. Coimbra, 2005.
MESQUITA, Rafael Pimenta. Análise de viabilidade técnica-econômica para a aplicação de inversores de frequência em sistemas de bombeamento de baixa potência. Dissertação (Mestrado em Engenharia Mecânica) – Universidade Federal Paulista. Guaratinguetá, 2009.
MORAIS, Diego Roberto. Ferramenta inteligente para detecção de falhas incipientes em transformadores baseada na análise de gases dissolvidos no óleo isolante. Dissertação (Mestrado em Engenharia Elétrica) – Universidade Federal de Santa Catarina. Florianópolis, 2004.
MOTOKI, Édison M. et alii. Procedimentos Aplicados à Indústria para a Melhoria da Suportabilidade de Conversores de Frequência VSI-PWM Frente a Afundamentos de Tensão. In: VIII Conferência Internacional de Aplicações Industriais. Poços de Caldas: Induscon, 2008.
NASCIMENTO JR, Geraldo Carvalho do. Máquinas Elétricas: teoria e ensaios. 4. ed. São Paulo: Érica, 2011.
POLING, Al. Calculate the impact of unreliability on sales. Maintenance Technology. Jul/2016. Disponível em: Acesso em: 12/out/2016.
PONTEL, Silmar; MIGUEL, Paulo A. C. Estudo de caso em custos da qualidade na categoria de falhas externas. Núcleo de Gestão da Qualidade & Metrologia. Santa Bárbara D’Oeste: UNIMEP, 1999.
PUC-RIO. Técnicas inteligentes aplicadas à detecção e diagnóstico de falhas. s/d.
RASHID, Muhammad H. Eletrônica de potência: circuitos, dispositivos e aplicações. São Paulo: Makron Books, 1999.
RIGNEL, Diego G. S.; CHENCI, Gabriel P.; LUCAS, Carlos A. Uma introdução a lógica Fuzzy. Revista Eletrônica de Sistemas de Informação e Gestão Tecnológica. vol. 01. 2011.
ROCKWELL AUTOMATION. Installation Instructions. 2013.
SAKURADA, Eduardo Yuji. As técnicas de análise dos modos de falhas e seus efeitos e análise da arvore de falhas no desenvolvimento e na avaliação de produtor. Dissertação (Mestrado em Engenharia Mecânica) – Universidade Federal de Santa Catarina. Florianópolis, 2001. cap. 4.
SENS, Moacyr. Avanços tecnológicos nos motores elétricos. WEG em Revista. Jan/fev. 2001.
SILVA, Clodoaldo. Inversor de frequência. Automação e Controle. Set/2009. Disponível em:
SILVA, Diego Rodrigo Cabral. Sistema de detecção e isolamento de falhas em sistemas dinâmicos baseado em identificação paramétrica. Tese (Doutorado em Engenharia Elétrica) – Universidade Federal do Rio Grande do Norte. Natal, 2008.
SOOD, Bhanu. Failure Analysis for Improved Reliability. NASA Goddard, mar/2016.
SOUSA, Juliano Neves de Paula e. Aplicação de lógica fuzzy em sistemas de controle de tráfego metropolitano em rodovias dotadas de faixas exclusivas para ônibus. Tese (Mestrado em Ciências em Engenharia de Transportes) – Universidade Federal do Rio de Janeiro. Rio de Janeiro, 2005.
SOUZA, Denise Cascão Poli. Falhas e defeitos ocorridos em transformadores de potência do sistema elétrico da Celg, nos últimos 28 anos: um estudo de caso. Dissertação (Mestrado em Engenharia Elétrica e de Computação) – Universidade Federal de Goiás. Goiânia, 2008.
TANSCHEIT, Ricardo. Sistemas Fuzzy. Rio de Janeiro: PUC-Rio, 2003.
THEISEN, Jeff. Principle of Operation-Dynamic Braking: what is dynamic braking. MrPLC Knowledgebase. Jul/2009. Disponível em: Acesso em: 12/out/2016.
ZADEH, Lotfi A. Outline of a new approach to the analysis of complex systems and decision processes. IEEE Transactions on Systems, Man, And Cybernetics, vol. smc-3, n. 1. Jan/1973.
ZANELLA, Liane Carly Hermes. Metodologia de Estudo e Pesquisa em Administração. Florianópolis: Departamento de Ciências da Administração/UFSC; Brasília: CAPES/UAB, 2009.
ZIDANI, Fatiha et alii. A fuzzy-based approach for the diagnosis of fault modes in a voltage-fed pwm inverter induction motor drive. IEEE Transactions on Industrial Electronics, vol. 55, n. 2, fev/2008.
Publicado por: MARCELO MONTEIRO DE CASTRO
O texto publicado foi encaminhado por um usuário do site por meio do canal colaborativo Monografias. Brasil Escola não se responsabiliza pelo conteúdo do artigo publicado, que é de total responsabilidade do autor . Para acessar os textos produzidos pelo site, acesse: https://www.brasilescola.com.























